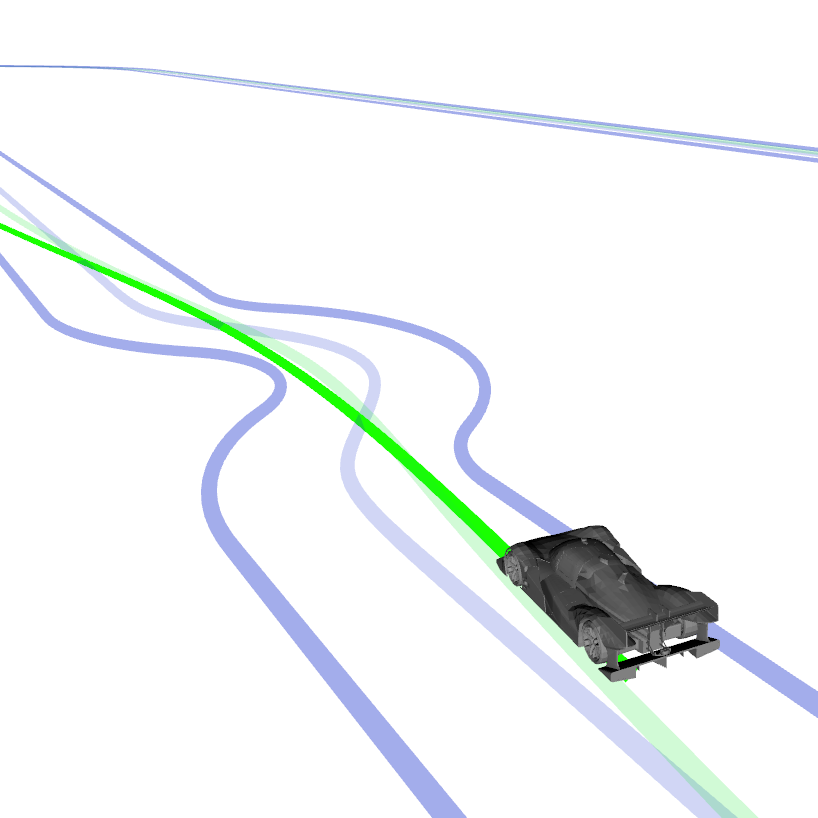
PWM: Policy Learning with Large World Models
Ignat Georgiev, Varun Giridhar, Nicklas Hansen, Animesh Garg
Hey! I'm Ignat, a Robot Learning researcher. I am currently doing a PhD at Georgia Tech, working with Animesh Garg. My deeply seeded belief is that robotics and learning have the potential to change the world for the better, and my mission is to bring intelligent star-wars-like robots one step closer to reality (minus the blasters).
Prior used to work as an ML engineer/researcher in autonomous vehicles. Nowadays I occasionally do some consulting or contracting work on projects I find interesting. Shoot me an email if you have something in mind!
This little website is my space to tell the world about me, put my resume out there, show off my research and blog some wisdom. You can find all of my research on Google Scholar.